ซอฟต์สตาร์ทเตอร์เป็นอุปกรณ์ควบคุมมอเตอร์ที่ผสานการทำงานแบบซอฟต์สตาร์ท การหยุดแบบซอฟต์ การประหยัดพลังงานโหลดเบา และฟังก์ชันการป้องกันต่างๆ เข้าด้วยกัน ประกอบไปด้วยไทริสเตอร์ป้องกันขนานสามเฟสเป็นหลัก ซึ่งเชื่อมต่อแบบอนุกรมระหว่างแหล่งจ่ายไฟและมอเตอร์ที่ควบคุมและวงจรควบคุมอิเล็กทรอนิกส์ มีการใช้หลายวิธีในการควบคุมมุมการนำไฟฟ้าของไทริสเตอร์ป้องกันขนานสามเฟส เพื่อให้แรงดันไฟฟ้าขาเข้าของมอเตอร์ที่ควบคุมเปลี่ยนแปลงไปตามความต้องการที่แตกต่างกัน
1. ใช้การควบคุมอัตโนมัติแบบดิจิตอลไมโครโปรเซสเซอร์ ทำให้มีประสิทธิภาพทางแม่เหล็กไฟฟ้าที่ยอดเยี่ยม การสตาร์ทแบบนุ่มนวล การหยุดแบบนุ่มนวล หรือการหยุดแบบอิสระ
2. สามารถปรับแรงดันเริ่มต้น กระแสไฟ เวลาเริ่มต้นแบบนุ่มนวล และเวลาหยุดแบบนุ่มนวลได้ตามโหลดที่แตกต่างกัน เพื่อลดแรงกระแทกของกระแสไฟเริ่มต้น ประสิทธิภาพที่เสถียร ใช้งานง่าย แสดงผลโดยตรง ปริมาณน้อย ตั้งค่าดิจิทัล มีฟังก์ชั่นควบคุมระยะไกลและควบคุมภายนอก
3.มีระบบป้องกันการสูญเสียเฟส, แรงดันไฟเกิน, โหลดเกิน, กระแสเกิน, ความร้อนสูงเกินไป
4. มีฟังก์ชั่นการแสดงแรงดันไฟฟ้าขาเข้า, การแสดงกระแสไฟฟ้าขณะทำงาน, การตรวจสอบตัวเองเมื่อเกิดข้อผิดพลาด, หน่วยความจำข้อผิดพลาด มีเอาต์พุตค่าจำลอง 0-20mA สามารถตรวจสอบกระแสไฟฟ้าของมอเตอร์ได้
มอเตอร์เหนี่ยวนำกระแสสลับมีข้อดีคือมีต้นทุนต่ำ ความน่าเชื่อถือสูง และไม่ต้องบำรุงรักษาบ่อย
ข้อเสีย:
1. กระแสเริ่มต้นสูงกว่ากระแสที่กำหนด 5-7 เท่า และต้องใช้แหล่งจ่ายไฟที่มีระยะขอบสูง นอกจากนี้ยังช่วยลดอายุการใช้งานของอุปกรณ์ควบคุมไฟฟ้า ซึ่งจะช่วยปรับปรุงต้นทุนการบำรุงรักษา
2. แรงบิดเริ่มต้นคือค่าเวลาสองเท่าของแรงบิดเริ่มต้นปกติ ซึ่งอาจทำให้เกิดแรงกระแทกจากโหลดและความเสียหายต่อส่วนประกอบไดรฟ์ ซอฟต์สตาร์ทเตอร์ RDJR6 ใช้โมดูลไทอิสเตอร์ที่ควบคุมได้และเทคโนโลยีการเลื่อนเฟสเพื่อปรับปรุงแรงดันไฟฟ้าของมอเตอร์อย่างสม่ำเสมอ และสามารถควบคุมแรงบิด กระแส และโหลดของมอเตอร์ได้ตามพารามิเตอร์ควบคุม ซอฟต์สตาร์ทเตอร์ซีรีส์ RDJR6 ใช้ไมโครโปรเซสเซอร์เพื่อควบคุมและใช้งานฟังก์ชันการสตาร์ทแบบนุ่มนวลและการหยุดแบบนุ่มนวลของมอเตอร์อะซิงโครนัส AC มีฟังก์ชันการป้องกันที่สมบูรณ์ และใช้กันอย่างแพร่หลายในอุปกรณ์ขับเคลื่อนมอเตอร์ในสาขาโลหะวิทยา ปิโตรเลียม เหมืองแร่ และอุตสาหกรรมเคมี
ข้อมูลจำเพาะการผลิต
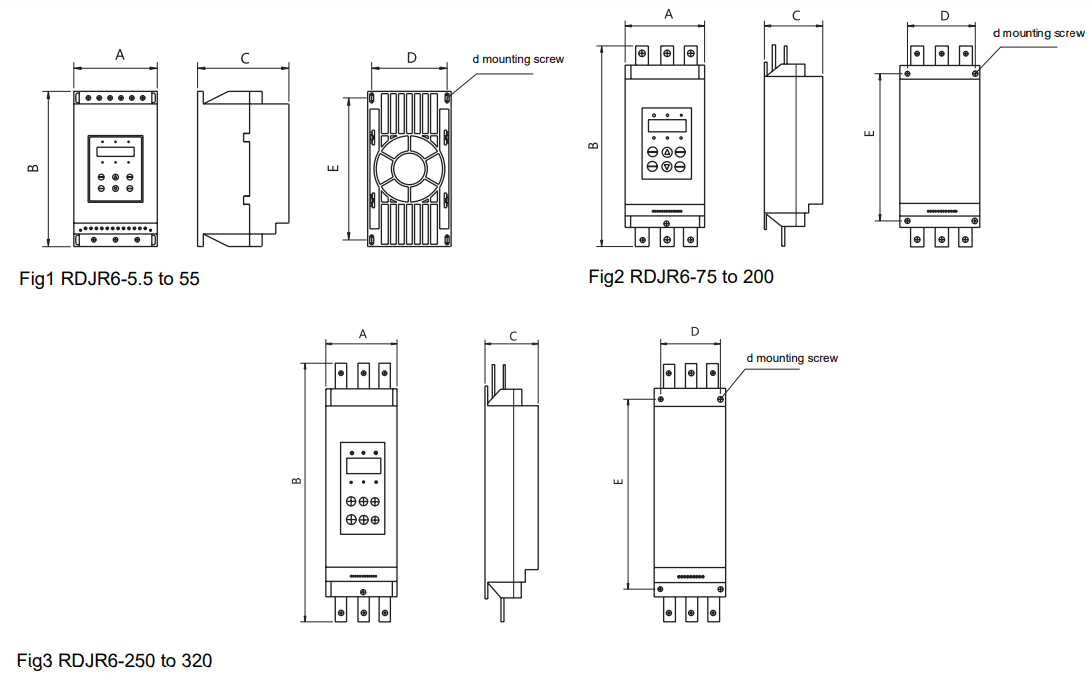
| หมายเลขรุ่น | กำลังไฟฟ้าที่กำหนด (กิโลวัตต์) | กระแสไฟฟ้าที่กำหนด (A) | กำลังมอเตอร์ที่ใช้ได้ (กิโลวัตต์) | ขนาดรูปร่าง (มม.) | น้ำหนัก (กก.) | บันทึก | |||||
| A | B | C | D | E | d | ||||||
| อาร์ดีเจอาร์6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | รูปที่ 2.1 |
| อาร์ดีเจอาร์6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| อาร์ดีเจอาร์6-22 | 22 | 44 | 22 | ||||||||
| อาร์ดีเจอาร์6-30 | 30 | 60 | 30 | ||||||||
| อาร์ดีเจอาร์6-37 | 37 | 74 | 37 | ||||||||
| อาร์ดีเจอาร์6-45 | 45 | 90 | 45 | ||||||||
| อาร์ดีเจอาร์6-55 | 55 | 110 | 55 | ||||||||
| อาร์ดีเจอาร์6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | รูปที่ 2.2 |
| อาร์ดีเจอาร์6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| อาร์ดีเจอาร์6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| อาร์ดีเจอาร์6-200 | 200 | 400 | 200 | ||||||||
| อาร์ดีเจอาร์6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | รูปที่ 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
แผนภาพ
พารามิเตอร์การทำงาน
| รหัส | ชื่อฟังก์ชั่น | ช่วงการตั้งค่า | ค่าเริ่มต้น | คำแนะนำ | |||||||
| P0 | แรงดันไฟเริ่มต้น | (30-70) | 30 | PB1=1 แบบจำลองความลาดชันของแรงดันไฟฟ้ามีประสิทธิผล เมื่อการตั้งค่า PB เป็นโหมดปัจจุบัน ค่าเริ่มต้นของแรงดันไฟฟ้าเริ่มต้นคือ 40% | |||||||
| P1 | เวลาเริ่มต้นแบบนุ่มนวล | (2-60)วินาที | 16 วินาที | PB1=1 แบบจำลองความลาดชันของแรงดันไฟฟ้ามีประสิทธิผล | |||||||
| P2 | เวลาหยุดแบบนุ่มนวล | (0-60)วินาที | 0s | ตั้งค่า=0 สำหรับการหยุดฟรี | |||||||
| P3 | เวลารายการ | (0-999)วินาที | 0s | หลังจากได้รับคำสั่ง ให้ใช้ประเภทนับถอยหลังเพื่อหน่วงเวลาการเริ่มต้นหลังจากตั้งค่า P3 | |||||||
| P4 | การหน่วงเวลาเริ่มต้น | (0-999)วินาที | 0s | การหน่วงเวลาการทำงานของรีเลย์แบบตั้งโปรแกรมได้ | |||||||
| P5 | ความล่าช้าของโปรแกรม | (0-999)วินาที | 0s | หลังจากถอดความร้อนสูงเกินไปและตั้งค่า P5 ล่าช้า ก็เข้าสู่สถานะพร้อมแล้ว | |||||||
| P6 | ช่วงเวลาล่าช้า | (50-500)% | 400% | เกี่ยวข้องกับการตั้งค่า PB โดยเมื่อตั้งค่า PB เป็น 0 ค่าเริ่มต้นคือ 280% และการแก้ไขจะมีผล เมื่อตั้งค่า PB เป็น 1 ค่าจำกัดจะอยู่ที่ 400% | |||||||
| P7 | กระแสเริ่มต้นจำกัด | (50-200)% | 100% | ใช้ปรับค่าป้องกันการโอเวอร์โหลดของมอเตอร์ ประเภทอินพุต P6, P7 ขึ้นอยู่กับ P8 | |||||||
| P8 | กระแสไฟฟ้าปฏิบัติการสูงสุด | 0-3 | 1 | ใช้ในการตั้งค่าค่าปัจจุบันหรือเปอร์เซ็นต์ | |||||||
| P9 | โหมดการแสดงผลปัจจุบัน | (40-90)% | 80% | ค่าต่ำกว่าที่ตั้งไว้ การแสดงผลความล้มเหลวคือ “Err09″ | |||||||
| PA | การป้องกันแรงดันไฟต่ำ | (100-140)% | 120% | หากค่าสูงกว่าค่าที่ตั้งไว้ การแสดงผลความล้มเหลวจะเป็น "Err10" | |||||||
| PB | วิธีการเริ่มต้น | 0-5 | 1 | 0 จำกัดกระแส, 1 แรงดันไฟ, 2 เตะ+จำกัดกระแส, 3 เตะ+จำกัดกระแส, 4 ความชันกระแส, 5 แบบวงจรคู่ | |||||||
| PC | การป้องกันเอาต์พุตอนุญาต | 0-4 | 4 | 0 หลัก, 1 โหลดขั้นต่ำ, 2 มาตรฐาน, 3 โหลดหนัก, 4 อาวุโส | |||||||
| PD | โหมดควบคุมการทำงาน | 0-7 | 1 | ใช้เพื่อเลือกการตั้งค่าแผงควบคุมภายนอก 0 สำหรับการใช้งานแผงควบคุมเท่านั้น 1 สำหรับการใช้งานทั้งแผงควบคุมและเทอร์มินัลควบคุมภายนอก | |||||||
| PE | ตัวเลือกรีบูตอัตโนมัติ | 0-13 | 0 | 0: ห้าม, 1-9 สำหรับเวลาการรีเซ็ตอัตโนมัติ | |||||||
| PF | อนุญาตการแก้ไขพารามิเตอร์ | 0-2 | 1 | 0: fohibid, 1 สำหรับส่วนที่อนุญาตแก้ไขข้อมูล, 2 สำหรับข้อมูลที่อนุญาตแก้ไขทั้งหมด | |||||||
| PH | ที่อยู่สำหรับการติดต่อสื่อสาร | 0-63 | 0 | ใช้ในการสื่อสารของซอฟต์สตาร์ทเตอร์หลายตัวและอุปกรณ์ส่วนบน | |||||||
| PJ | เอาท์พุตของโปรแกรม | 0-19 | 7 | ใช้สำหรับตั้งค่าเอาต์พุตรีเลย์แบบตั้งโปรแกรมได้ (3-4) | |||||||
| PL | กระแสไฟหยุดแบบนิ่มจำกัด | (20-100)% | 80% | ใช้เพื่อตั้งค่าจำกัดกระแสการหยุดแบบนุ่มนวล P2 | |||||||
| PP | กระแสไฟฟ้าที่กำหนดของมอเตอร์ | (11-1200)ก | มูลค่าที่ได้รับการจัดอันดับ | ใช้เพื่อป้อนกระแสไฟฟ้าที่กำหนดของมอเตอร์ | |||||||
| PU | การป้องกันแรงดันไฟต่ำของมอเตอร์ | (10-90)% | ห้าม | ใช้ในการตั้งค่าฟังก์ชั่นการป้องกันแรงดันไฟต่ำของมอเตอร์ | |||||||
คำแนะนำการล้มเหลว
| รหัส | คำแนะนำ | ปัญหาและวิธีแก้ไข | |||||||||
| เอ่อ00 | ไม่มีความล้มเหลว | แก้ไขปัญหาแรงดันไฟฟ้าต่ำเกินไป แรงดันไฟฟ้าเกิน ความร้อนสูงเกินไป หรือขั้วหยุดการทำงานชั่วคราวเปิดแล้ว ไฟแสดงสถานะแผงสว่างขึ้น กดปุ่ม "หยุด" เพื่อรีเซ็ต แล้วสตาร์ทมอเตอร์ | |||||||||
| เออร์01 | เทอร์มินัลหยุดชั่วคราวภายนอกเปิดอยู่ | ตรวจสอบว่าขั้วต่อชั่วคราวภายนอก 7 และขั้วต่อทั่วไป 10 เป็นไฟฟ้าลัดวงจรหรือหน้าสัมผัส NC ของอุปกรณ์ป้องกันอื่นเป็นปกติหรือไม่ | |||||||||
| เออร์02 | สตาร์ทเตอร์แบบนิ่มร้อนเกินไป | อุณหภูมิหม้อน้ำเกิน 85C, มีการป้องกันความร้อนสูงเกินไป, ซอฟต์สตาร์ทมอเตอร์สตาร์ทบ่อยเกินไป หรือกำลังมอเตอร์ไม่สามารถใช้กับซอฟต์สตาร์ทได้ | |||||||||
| เออร์03 | เริ่มงานล่วงเวลา | ข้อมูลการตั้งค่าเริ่มต้นไม่สามารถใช้งานได้หรือโหลดหนักเกินไป ความจุพลังงานน้อยเกินไป | |||||||||
| เออร์04 | การสูญเสียเฟสอินพุต | ตรวจสอบว่าอินพุตหรือลูปหลักมีข้อผิดพลาดหรือไม่ หรือคอนแทคเตอร์บายพาสสามารถตัดและสร้างวงจรได้ตามปกติหรือไม่ หรือตัวควบคุมซิลิกอนเปิดอยู่หรือไม่ | |||||||||
| เออร์05 | การสูญเสียเฟสเอาต์พุต | ตรวจสอบว่าอินพุตหรือลูปหลักมีข้อบกพร่องหรือไม่ หรือคอนแทคเตอร์บายพาสสามารถตัดและสร้างวงจรได้ตามปกติหรือไม่ หรือว่าตัวควบคุมซิลิกอนเปิดอยู่หรือไม่ หรือว่าการเชื่อมต่อมอเตอร์มีข้อบกพร่องบางประการหรือไม่ | |||||||||
| เออร์06 | สามเฟสไม่สมดุล | ตรวจสอบว่าไฟฟ้าอินพุต 3 เฟสและมอเตอร์มีข้อผิดพลาดหรือไม่ หรือหม้อแปลงกระแสไฟฟ้าส่งสัญญาณออกมาหรือไม่ | |||||||||
| เออร์07 | กระแสไฟเกินเริ่มต้น | หากโหลดมีน้ำหนักมากเกินไปหรือสามารถใช้พลังงานมอเตอร์ได้โดยใช้สตาร์ทเตอร์แบบนิ่ม หรือตั้งค่า PC (อนุญาตให้ป้องกันเอาต์พุต) เป็นค่าเริ่มต้น | |||||||||
| เอ่อ08 | การป้องกันการโอเวอร์โหลดในการทำงาน | หากโหลดหนักเกินไปหรือ P7 ให้ตั้งค่า PP ผิดพลาด | |||||||||
| เออร์09 | แรงดันไฟฟ้าต่ำเกินไป | ตรวจสอบว่าแรงดันไฟฟ้าขาเข้าหรือวันที่ตั้งค่าของ P9 เป็นข้อผิดพลาดหรือไม่ | |||||||||
| เอ่อ10 | แรงดันไฟเกิน | ตรวจสอบว่าแรงดันไฟฟ้าขาเข้าหรือวันที่ตั้งค่า PA เป็นข้อผิดพลาดหรือไม่ | |||||||||
| เออร์11 | การตั้งค่าข้อมูลผิดพลาด | แก้ไขการตั้งค่าหรือกดปุ่ม “Enter” เพื่อเริ่มการรีเซ็ต | |||||||||
| เออร์12 | การลัดวงจรของการโหลด | ตรวจสอบว่าซิลิโคนเกิดไฟฟ้าลัดวงจรหรือไม่ หรือโหลดมีน้ำหนักมากเกินไป หรือคอยล์มอเตอร์เกิดไฟฟ้าลัดวงจรหรือไม่ | |||||||||
| เออร์13 | เกิดข้อผิดพลาดในการเริ่มการเชื่อมต่อใหม่ | ตรวจสอบว่าขั้วต่อเริ่มต้นภายนอก 9 และขั้วต่อหยุด 8 เชื่อมต่อตามประเภทสองสายหรือไม่ | |||||||||
| เออร์14 | ข้อผิดพลาดการเชื่อมต่อเทอร์มินัลหยุดภายนอก | เมื่อตั้งค่า PD เป็น 1, 2, 3, 4 (อนุญาตให้ควบคุมจากภายนอก) ขั้วหยุดภายนอก 8 และขั้วร่วม 10 จะไม่เกิดการลัดวงจร มีเพียงการลัดวงจรเท่านั้น จึงสามารถสตาร์ทมอเตอร์ได้ | |||||||||
| เออร์15 | มอเตอร์รับภาระต่ำ | ตรวจสอบมอเตอร์และข้อผิดพลาดของโหลด | |||||||||
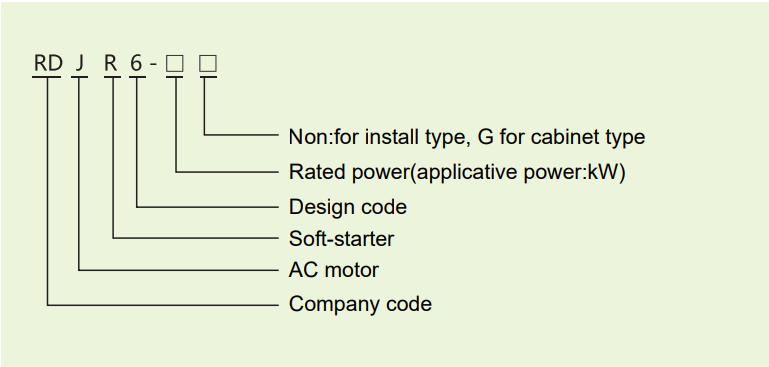
หมายเลขรุ่น
เทอร์มินัลควบคุมภายนอก

คำจำกัดความของเทอร์มินัลควบคุมภายนอก
| ค่าสวิตช์ | รหัสเทอร์มินัล | ฟังก์ชันเทอร์มินัล | คำแนะนำ | |||||||
| เอาท์พุตรีเลย์ | 1 | เอาท์พุตบายพาส | คอนแทคเตอร์บายพาสควบคุม เมื่อสตาร์ทเตอร์แบบซอฟต์สตาร์ทสำเร็จ จะไม่มีการสัมผัสหากไม่มีแหล่งจ่ายไฟ ความจุ: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | เอาท์พุตรีเลย์แบบตั้งโปรแกรมได้ | ประเภทเอาต์พุตและฟังก์ชันถูกกำหนดโดย P4 และ PJ โดยไม่ต้องสัมผัสโดยไม่มีแหล่งจ่ายไฟ ความจุ: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | เอาท์พุตรีเลย์ความล้มเหลว | เมื่อสตาร์ทเตอร์แบบซอฟต์เกิดความล้มเหลว รีเลย์นี้จะปิด จะไม่มีการสัมผัสโดยไม่มีแหล่งจ่ายไฟ ความจุ: AC250V/5A | ||||||||
| 6 | ||||||||||
| ป้อนข้อมูล | 7 | หยุดชั่วคราว | การสตาร์ทแบบซอฟต์สตาร์ทปกติจะต้องทำให้ขั้วต่อนี้สั้นลงด้วยขั้วต่อ 10 | |||||||
| 8 | หยุด/รีเซ็ต | เชื่อมต่อกับเทอร์มินอล 10 เพื่อควบคุม 2 สาย, 3 สาย ตามวิธีการเชื่อมต่อ | ||||||||
| 9 | เริ่ม | |||||||||
| 10 | ขั้วทั่วไป | |||||||||
| เอาท์พุตแบบอะนาล็อก | 11 | การจำลองจุดร่วม (-) | กระแสขาออกของกระแสที่กำหนด 4 เท่าคือ 20mA นอกจากนี้ยังสามารถตรวจจับได้โดยมิเตอร์ DC ภายนอก สามารถส่งออกความต้านทานโหลดสูงสุดได้ 300 | |||||||
| 12 | กระแสเอาต์พุตจำลอง (+) | |||||||||
แผงจอแสดงผล

| ตัวบ่งชี้ | คำแนะนำ | ||||||||
| พร้อม | เมื่อเปิดเครื่องและอยู่ในสถานะพร้อม ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| ผ่าน | เมื่อใช้งานบายพาส ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| ข้อผิดพลาด | เมื่อเกิดความล้มเหลว ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| A | การตั้งค่าข้อมูลเป็นค่าปัจจุบัน ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| % | การตั้งค่าข้อมูลเป็นเปอร์เซ็นต์ปัจจุบัน ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| s | การตั้งค่าข้อมูลคือเวลา ไฟแสดงสถานะนี้จะสว่าง | ||||||||
คำสั่งตัวบ่งชี้สถานะ
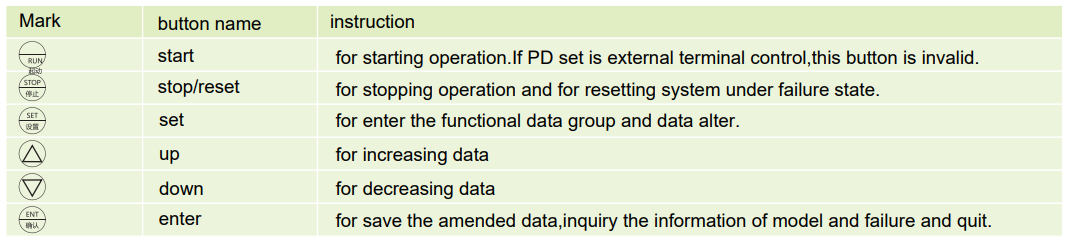
คำสั่งปุ่ม คำสั่ง
ซอฟต์สตาร์ทเตอร์ซีรีส์ RDJR6 มีสถานะการทำงาน 5 ประเภท: พร้อม, การทำงาน, ความล้มเหลว, เริ่มและหยุด, พร้อม, การทำงาน, ความล้มเหลว
มีสัญญาณบ่งชี้สัมพัทธ์ ดูคำแนะนำในตารางด้านบน
ในการประมวลผลการเริ่มต้นแบบนุ่มนวลและการหยุดแบบนุ่มนวล ไม่สามารถตั้งค่าข้อมูลได้ ยกเว้นในกรณีที่ข้อมูลอยู่ในสถานะอื่นเท่านั้น
ภายใต้สถานะการตั้งค่า สถานะการตั้งค่าจะออกจากสถานะการตั้งค่าโดยไม่มีการดำเนินการใดๆ หลังจาก 2 นาที
กดปุ่ม "Enter" ก่อน จากนั้นชาร์จและสตาร์ทเครื่อง หลังจากฟังเสียงเตือนแล้ว ก็สามารถรีเซ็ตได้
ข้อมูลกลับเป็นค่าโรงงาน
รูปลักษณ์และขนาดการติดตั้ง
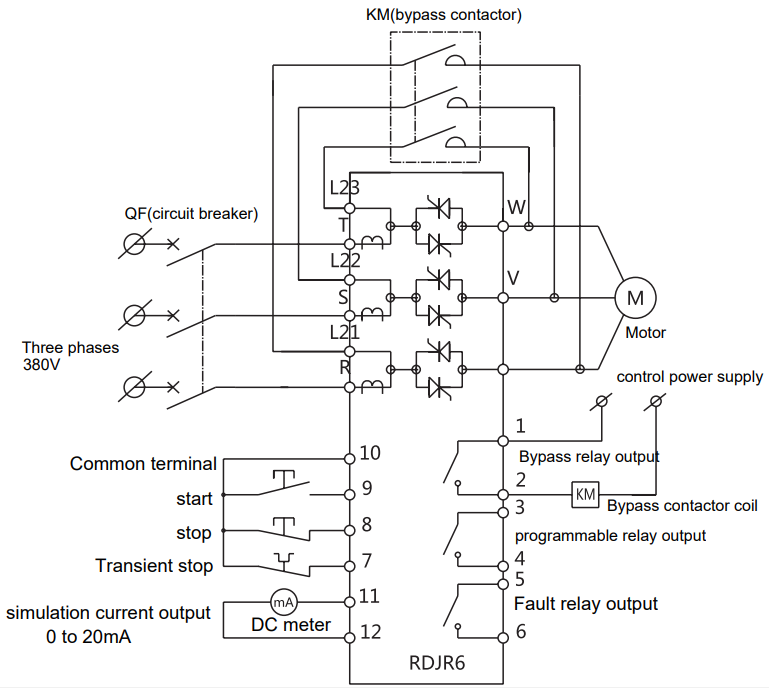
แผนภาพการใช้งาน
แผนภาพควบคุมปกติ
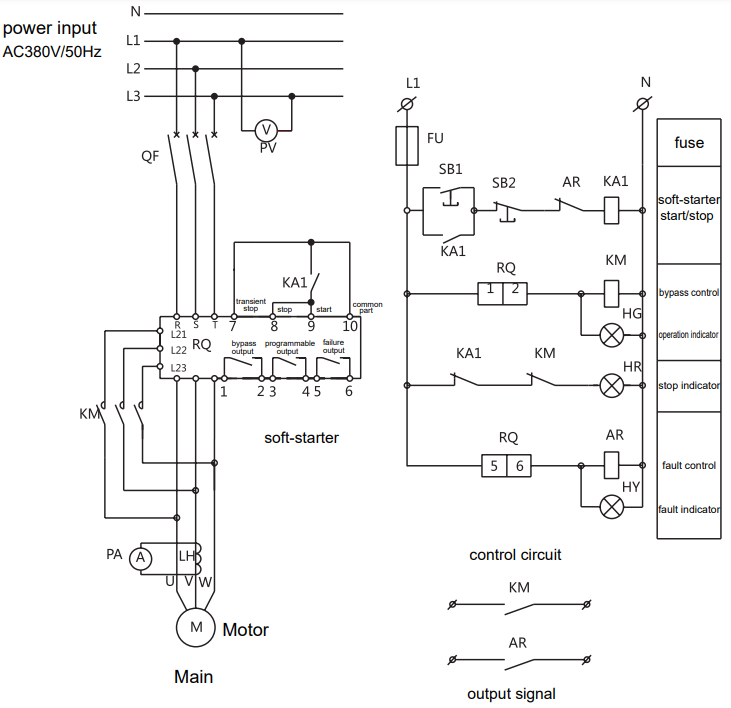
คำแนะนำ:
1. เทอร์มินัลภายนอกใช้ตัวควบคุมแบบสองสาย เมื่อ KA1 ปิดเพื่อเริ่มต้น จะเปิดเพื่อหยุด
2. สตาร์ทเตอร์แบบซอฟต์สตาร์ทที่มีกำลังมากกว่า 75 กิโลวัตต์ จำเป็นต้องควบคุมคอยล์คอนแทคเตอร์บายพาสด้วยรีเลย์กลาง เนื่องจากความสามารถในการขับเคลื่อนของหน้าสัมผัสรีเลย์ภายในแบบซอฟต์สเตรเตอร์มีจำกัด
12.2 ไดอะแกรมควบคุมทั่วไปหนึ่งไดอะแกรมและแบบสแตนด์บายหนึ่งไดอะแกรม
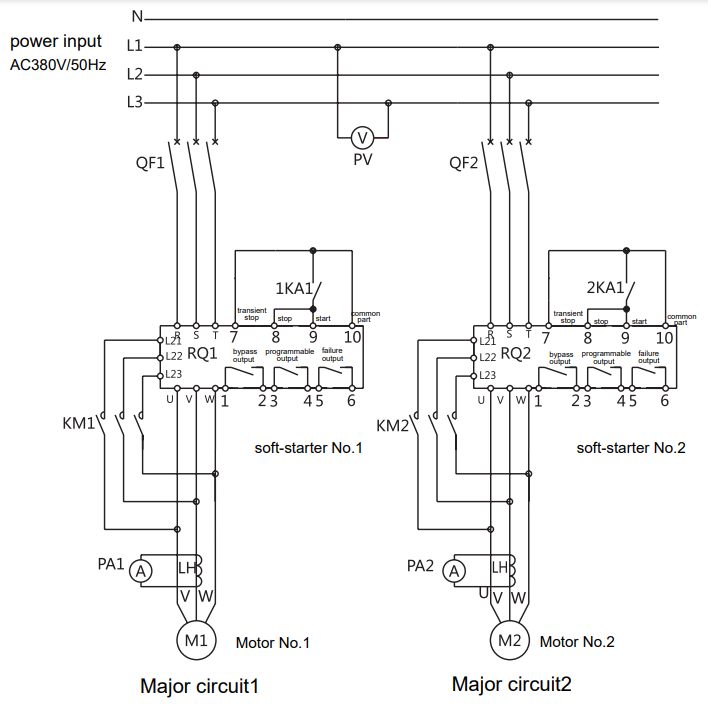
12.3 ไดอะแกรมควบคุมทั่วไปหนึ่งไดอะแกรมและแบบสแตนด์บายหนึ่งไดอะแกรม
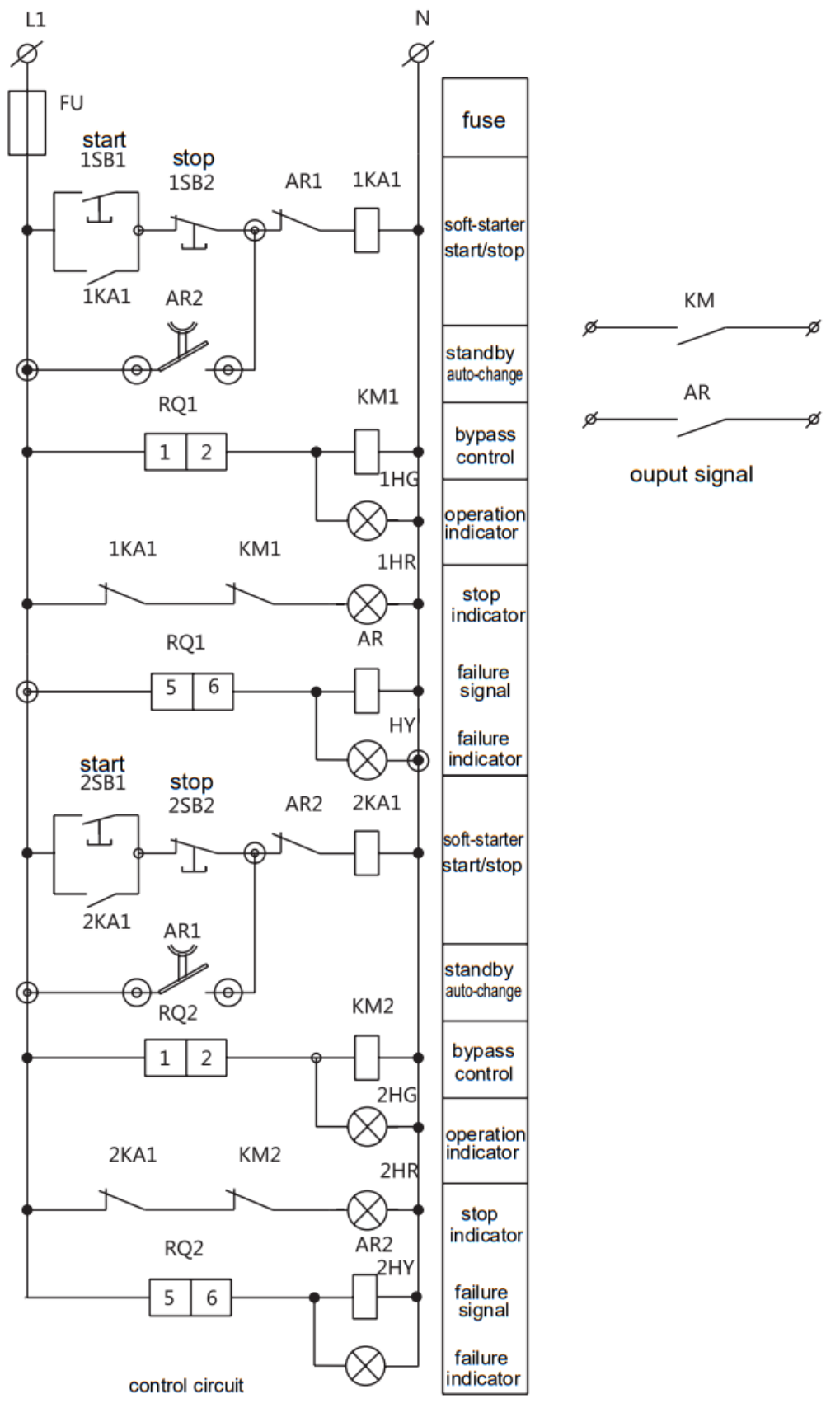
คำแนะนำ:
1. ในแผนภาพ เทอร์มินัลภายนอกใช้แบบสองสาย
(เมื่อ 1KA1 หรือ 2KA1 ปิด มันก็จะเริ่ม เมื่อพวกมันแตก มันก็จะหยุด)
2. ซอฟต์สตาร์ทเตอร์ที่สูงกว่า 75 กิโลวัตต์จำเป็นต้องควบคุมคอยล์คอนแทคเตอร์บายพาสด้วยรีเลย์กลางเนื่องจากความสามารถในการขับเคลื่อนของหน้าสัมผัสรีเลย์กลางภายในของซอฟต์สตาร์ทเตอร์มีจำกัด
มอเตอร์เหนี่ยวนำกระแสสลับมีข้อดีคือมีต้นทุนต่ำ ความน่าเชื่อถือสูง และไม่ต้องบำรุงรักษาบ่อย
ข้อเสีย:
1. กระแสเริ่มต้นสูงกว่ากระแสที่กำหนด 5-7 เท่า และต้องใช้แหล่งจ่ายไฟที่มีระยะขอบสูง นอกจากนี้ยังช่วยลดอายุการใช้งานของอุปกรณ์ควบคุมไฟฟ้า ซึ่งจะช่วยปรับปรุงต้นทุนการบำรุงรักษา
2. แรงบิดเริ่มต้นคือค่าเวลาสองเท่าของแรงบิดเริ่มต้นปกติ ซึ่งอาจทำให้เกิดแรงกระแทกจากโหลดและความเสียหายต่อส่วนประกอบไดรฟ์ ซอฟต์สตาร์ทเตอร์ RDJR6 ใช้โมดูลไทอิสเตอร์ที่ควบคุมได้และเทคโนโลยีการเลื่อนเฟสเพื่อปรับปรุงแรงดันไฟฟ้าของมอเตอร์อย่างสม่ำเสมอ และสามารถควบคุมแรงบิด กระแส และโหลดของมอเตอร์ได้ตามพารามิเตอร์ควบคุม ซอฟต์สตาร์ทเตอร์ซีรีส์ RDJR6 ใช้ไมโครโปรเซสเซอร์เพื่อควบคุมและใช้งานฟังก์ชันการสตาร์ทแบบนุ่มนวลและการหยุดแบบนุ่มนวลของมอเตอร์อะซิงโครนัส AC มีฟังก์ชันการป้องกันที่สมบูรณ์ และใช้กันอย่างแพร่หลายในอุปกรณ์ขับเคลื่อนมอเตอร์ในสาขาโลหะวิทยา ปิโตรเลียม เหมืองแร่ และอุตสาหกรรมเคมี
ข้อมูลจำเพาะการผลิต
| หมายเลขรุ่น | กำลังไฟฟ้าที่กำหนด (กิโลวัตต์) | กระแสไฟฟ้าที่กำหนด (A) | กำลังมอเตอร์ที่ใช้ได้ (กิโลวัตต์) | ขนาดรูปร่าง (มม.) | น้ำหนัก (กก.) | บันทึก | |||||
| A | B | C | D | E | d | ||||||
| อาร์ดีเจอาร์6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | รูปที่ 2.1 |
| อาร์ดีเจอาร์6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| อาร์ดีเจอาร์6-22 | 22 | 44 | 22 | ||||||||
| อาร์ดีเจอาร์6-30 | 30 | 60 | 30 | ||||||||
| อาร์ดีเจอาร์6-37 | 37 | 74 | 37 | ||||||||
| อาร์ดีเจอาร์6-45 | 45 | 90 | 45 | ||||||||
| อาร์ดีเจอาร์6-55 | 55 | 110 | 55 | ||||||||
| อาร์ดีเจอาร์6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | รูปที่ 2.2 |
| อาร์ดีเจอาร์6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| อาร์ดีเจอาร์6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| อาร์ดีเจอาร์6-200 | 200 | 400 | 200 | ||||||||
| อาร์ดีเจอาร์6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | รูปที่ 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
แผนภาพ
พารามิเตอร์การทำงาน
| รหัส | ชื่อฟังก์ชั่น | ช่วงการตั้งค่า | ค่าเริ่มต้น | คำแนะนำ | |||||||
| P0 | แรงดันไฟเริ่มต้น | (30-70) | 30 | PB1=1 แบบจำลองความลาดชันของแรงดันไฟฟ้ามีประสิทธิผล เมื่อการตั้งค่า PB เป็นโหมดปัจจุบัน ค่าเริ่มต้นของแรงดันไฟฟ้าเริ่มต้นคือ 40% | |||||||
| P1 | เวลาเริ่มต้นแบบนุ่มนวล | (2-60)วินาที | 16 วินาที | PB1=1 แบบจำลองความลาดชันของแรงดันไฟฟ้ามีประสิทธิผล | |||||||
| P2 | เวลาหยุดแบบนุ่มนวล | (0-60)วินาที | 0s | ตั้งค่า=0 สำหรับการหยุดฟรี | |||||||
| P3 | เวลารายการ | (0-999)วินาที | 0s | หลังจากได้รับคำสั่ง ให้ใช้ประเภทนับถอยหลังเพื่อหน่วงเวลาการเริ่มต้นหลังจากตั้งค่า P3 | |||||||
| P4 | การหน่วงเวลาเริ่มต้น | (0-999)วินาที | 0s | การหน่วงเวลาการทำงานของรีเลย์แบบตั้งโปรแกรมได้ | |||||||
| P5 | ความล่าช้าของโปรแกรม | (0-999)วินาที | 0s | หลังจากถอดความร้อนสูงเกินไปและตั้งค่า P5 ล่าช้า ก็เข้าสู่สถานะพร้อมแล้ว | |||||||
| P6 | ช่วงเวลาล่าช้า | (50-500)% | 400% | เกี่ยวข้องกับการตั้งค่า PB โดยเมื่อตั้งค่า PB เป็น 0 ค่าเริ่มต้นคือ 280% และการแก้ไขจะมีผล เมื่อตั้งค่า PB เป็น 1 ค่าจำกัดจะอยู่ที่ 400% | |||||||
| P7 | กระแสเริ่มต้นจำกัด | (50-200)% | 100% | ใช้ปรับค่าป้องกันการโอเวอร์โหลดของมอเตอร์ ประเภทอินพุต P6, P7 ขึ้นอยู่กับ P8 | |||||||
| P8 | กระแสไฟฟ้าปฏิบัติการสูงสุด | 0-3 | 1 | ใช้ในการตั้งค่าค่าปัจจุบันหรือเปอร์เซ็นต์ | |||||||
| P9 | โหมดการแสดงผลปัจจุบัน | (40-90)% | 80% | ค่าต่ำกว่าที่ตั้งไว้ การแสดงผลความล้มเหลวคือ “Err09″ | |||||||
| PA | การป้องกันแรงดันไฟต่ำ | (100-140)% | 120% | หากค่าสูงกว่าค่าที่ตั้งไว้ การแสดงผลความล้มเหลวจะเป็น "Err10" | |||||||
| PB | วิธีการเริ่มต้น | 0-5 | 1 | 0 จำกัดกระแส, 1 แรงดันไฟ, 2 เตะ+จำกัดกระแส, 3 เตะ+จำกัดกระแส, 4 ความชันกระแส, 5 แบบวงจรคู่ | |||||||
| PC | การป้องกันเอาต์พุตอนุญาต | 0-4 | 4 | 0 หลัก, 1 โหลดขั้นต่ำ, 2 มาตรฐาน, 3 โหลดหนัก, 4 อาวุโส | |||||||
| PD | โหมดควบคุมการทำงาน | 0-7 | 1 | ใช้เพื่อเลือกการตั้งค่าแผงควบคุมภายนอก 0 สำหรับการใช้งานแผงควบคุมเท่านั้น 1 สำหรับการใช้งานทั้งแผงควบคุมและเทอร์มินัลควบคุมภายนอก | |||||||
| PE | ตัวเลือกรีบูตอัตโนมัติ | 0-13 | 0 | 0: ห้าม, 1-9 สำหรับเวลาการรีเซ็ตอัตโนมัติ | |||||||
| PF | อนุญาตการแก้ไขพารามิเตอร์ | 0-2 | 1 | 0: fohibid, 1 สำหรับส่วนที่อนุญาตแก้ไขข้อมูล, 2 สำหรับข้อมูลที่อนุญาตแก้ไขทั้งหมด | |||||||
| PH | ที่อยู่สำหรับการติดต่อสื่อสาร | 0-63 | 0 | ใช้ในการสื่อสารของซอฟต์สตาร์ทเตอร์หลายตัวและอุปกรณ์ส่วนบน | |||||||
| PJ | เอาท์พุตของโปรแกรม | 0-19 | 7 | ใช้สำหรับตั้งค่าเอาต์พุตรีเลย์แบบตั้งโปรแกรมได้ (3-4) | |||||||
| PL | กระแสไฟหยุดแบบนิ่มจำกัด | (20-100)% | 80% | ใช้เพื่อตั้งค่าจำกัดกระแสการหยุดแบบนุ่มนวล P2 | |||||||
| PP | กระแสไฟฟ้าที่กำหนดของมอเตอร์ | (11-1200)ก | มูลค่าที่ได้รับการจัดอันดับ | ใช้เพื่อป้อนกระแสไฟฟ้าที่กำหนดของมอเตอร์ | |||||||
| PU | การป้องกันแรงดันไฟต่ำของมอเตอร์ | (10-90)% | ห้าม | ใช้ในการตั้งค่าฟังก์ชั่นการป้องกันแรงดันไฟต่ำของมอเตอร์ | |||||||
คำแนะนำการล้มเหลว
| รหัส | คำแนะนำ | ปัญหาและวิธีแก้ไข | |||||||||
| เอ่อ00 | ไม่มีความล้มเหลว | แก้ไขปัญหาแรงดันไฟฟ้าต่ำเกินไป แรงดันไฟฟ้าเกิน ความร้อนสูงเกินไป หรือขั้วหยุดการทำงานชั่วคราวเปิดแล้ว ไฟแสดงสถานะแผงสว่างขึ้น กดปุ่ม "หยุด" เพื่อรีเซ็ต แล้วสตาร์ทมอเตอร์ | |||||||||
| เออร์01 | เทอร์มินัลหยุดชั่วคราวภายนอกเปิดอยู่ | ตรวจสอบว่าขั้วต่อชั่วคราวภายนอก 7 และขั้วต่อทั่วไป 10 เป็นไฟฟ้าลัดวงจรหรือหน้าสัมผัส NC ของอุปกรณ์ป้องกันอื่นเป็นปกติหรือไม่ | |||||||||
| เออร์02 | สตาร์ทเตอร์แบบนิ่มร้อนเกินไป | อุณหภูมิหม้อน้ำเกิน 85C, มีการป้องกันความร้อนสูงเกินไป, ซอฟต์สตาร์ทมอเตอร์สตาร์ทบ่อยเกินไป หรือกำลังมอเตอร์ไม่สามารถใช้กับซอฟต์สตาร์ทได้ | |||||||||
| เออร์03 | เริ่มงานล่วงเวลา | ข้อมูลการตั้งค่าเริ่มต้นไม่สามารถใช้งานได้หรือโหลดหนักเกินไป ความจุพลังงานน้อยเกินไป | |||||||||
| เออร์04 | การสูญเสียเฟสอินพุต | ตรวจสอบว่าอินพุตหรือลูปหลักมีข้อผิดพลาดหรือไม่ หรือคอนแทคเตอร์บายพาสสามารถตัดและสร้างวงจรได้ตามปกติหรือไม่ หรือตัวควบคุมซิลิกอนเปิดอยู่หรือไม่ | |||||||||
| เออร์05 | การสูญเสียเฟสเอาต์พุต | ตรวจสอบว่าอินพุตหรือลูปหลักมีข้อบกพร่องหรือไม่ หรือคอนแทคเตอร์บายพาสสามารถตัดและสร้างวงจรได้ตามปกติหรือไม่ หรือว่าตัวควบคุมซิลิกอนเปิดอยู่หรือไม่ หรือว่าการเชื่อมต่อมอเตอร์มีข้อบกพร่องบางประการหรือไม่ | |||||||||
| เออร์06 | สามเฟสไม่สมดุล | ตรวจสอบว่าไฟฟ้าอินพุต 3 เฟสและมอเตอร์มีข้อผิดพลาดหรือไม่ หรือหม้อแปลงกระแสไฟฟ้าส่งสัญญาณออกมาหรือไม่ | |||||||||
| เออร์07 | กระแสไฟเกินเริ่มต้น | หากโหลดมีน้ำหนักมากเกินไปหรือสามารถใช้พลังงานมอเตอร์ได้โดยใช้สตาร์ทเตอร์แบบนิ่ม หรือตั้งค่า PC (อนุญาตให้ป้องกันเอาต์พุต) เป็นค่าเริ่มต้น | |||||||||
| เอ่อ08 | การป้องกันการโอเวอร์โหลดในการทำงาน | หากโหลดหนักเกินไปหรือ P7 ให้ตั้งค่า PP ผิดพลาด | |||||||||
| เออร์09 | แรงดันไฟฟ้าต่ำเกินไป | ตรวจสอบว่าแรงดันไฟฟ้าขาเข้าหรือวันที่ตั้งค่าของ P9 เป็นข้อผิดพลาดหรือไม่ | |||||||||
| เอ่อ10 | แรงดันไฟเกิน | ตรวจสอบว่าแรงดันไฟฟ้าขาเข้าหรือวันที่ตั้งค่า PA เป็นข้อผิดพลาดหรือไม่ | |||||||||
| เออร์11 | การตั้งค่าข้อมูลผิดพลาด | แก้ไขการตั้งค่าหรือกดปุ่ม “Enter” เพื่อเริ่มการรีเซ็ต | |||||||||
| เออร์12 | การลัดวงจรของการโหลด | ตรวจสอบว่าซิลิโคนเกิดไฟฟ้าลัดวงจรหรือไม่ หรือโหลดมีน้ำหนักมากเกินไป หรือคอยล์มอเตอร์เกิดไฟฟ้าลัดวงจรหรือไม่ | |||||||||
| เออร์13 | เกิดข้อผิดพลาดในการเริ่มการเชื่อมต่อใหม่ | ตรวจสอบว่าขั้วต่อเริ่มต้นภายนอก 9 และขั้วต่อหยุด 8 เชื่อมต่อตามประเภทสองสายหรือไม่ | |||||||||
| เออร์14 | ข้อผิดพลาดการเชื่อมต่อเทอร์มินัลหยุดภายนอก | เมื่อตั้งค่า PD เป็น 1, 2, 3, 4 (อนุญาตให้ควบคุมจากภายนอก) ขั้วหยุดภายนอก 8 และขั้วร่วม 10 จะไม่เกิดการลัดวงจร มีเพียงการลัดวงจรเท่านั้น จึงสามารถสตาร์ทมอเตอร์ได้ | |||||||||
| เออร์15 | มอเตอร์รับภาระต่ำ | ตรวจสอบมอเตอร์และข้อผิดพลาดของโหลด | |||||||||
หมายเลขรุ่น
เทอร์มินัลควบคุมภายนอก
คำจำกัดความของเทอร์มินัลควบคุมภายนอก
| ค่าสวิตช์ | รหัสเทอร์มินัล | ฟังก์ชันเทอร์มินัล | คำแนะนำ | |||||||
| เอาท์พุตรีเลย์ | 1 | เอาท์พุตบายพาส | คอนแทคเตอร์บายพาสควบคุม เมื่อสตาร์ทเตอร์แบบซอฟต์สตาร์ทสำเร็จ จะไม่มีการสัมผัสหากไม่มีแหล่งจ่ายไฟ ความจุ: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | เอาท์พุตรีเลย์แบบตั้งโปรแกรมได้ | ประเภทเอาต์พุตและฟังก์ชันถูกกำหนดโดย P4 และ PJ โดยไม่ต้องสัมผัสโดยไม่มีแหล่งจ่ายไฟ ความจุ: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | เอาท์พุตรีเลย์ความล้มเหลว | เมื่อสตาร์ทเตอร์แบบซอฟต์เกิดความล้มเหลว รีเลย์นี้จะปิด จะไม่มีการสัมผัสโดยไม่มีแหล่งจ่ายไฟ ความจุ: AC250V/5A | ||||||||
| 6 | ||||||||||
| ป้อนข้อมูล | 7 | หยุดชั่วคราว | การสตาร์ทแบบซอฟต์สตาร์ทปกติจะต้องทำให้ขั้วต่อนี้สั้นลงด้วยขั้วต่อ 10 | |||||||
| 8 | หยุด/รีเซ็ต | เชื่อมต่อกับเทอร์มินอล 10 เพื่อควบคุม 2 สาย, 3 สาย ตามวิธีการเชื่อมต่อ | ||||||||
| 9 | เริ่ม | |||||||||
| 10 | ขั้วทั่วไป | |||||||||
| เอาท์พุตแบบอะนาล็อก | 11 | การจำลองจุดร่วม (-) | กระแสขาออกของกระแสที่กำหนด 4 เท่าคือ 20mA นอกจากนี้ยังสามารถตรวจจับได้โดยมิเตอร์ DC ภายนอก สามารถส่งออกความต้านทานโหลดสูงสุดได้ 300 | |||||||
| 12 | กระแสเอาต์พุตจำลอง (+) | |||||||||
แผงจอแสดงผล
| ตัวบ่งชี้ | คำแนะนำ | ||||||||
| พร้อม | เมื่อเปิดเครื่องและอยู่ในสถานะพร้อม ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| ผ่าน | เมื่อใช้งานบายพาส ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| ข้อผิดพลาด | เมื่อเกิดความล้มเหลว ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| A | การตั้งค่าข้อมูลเป็นค่าปัจจุบัน ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| % | การตั้งค่าข้อมูลเป็นเปอร์เซ็นต์ปัจจุบัน ไฟแสดงสถานะนี้จะสว่าง | ||||||||
| s | การตั้งค่าข้อมูลคือเวลา ไฟแสดงสถานะนี้จะสว่าง | ||||||||
คำสั่งตัวบ่งชี้สถานะ
คำสั่งปุ่ม คำสั่ง
ซอฟต์สตาร์ทเตอร์ซีรีส์ RDJR6 มีสถานะการทำงาน 5 ประเภท: พร้อม, การทำงาน, ความล้มเหลว, เริ่มและหยุด, พร้อม, การทำงาน, ความล้มเหลว
มีสัญญาณบ่งชี้สัมพัทธ์ ดูคำแนะนำในตารางด้านบน
ในการประมวลผลการเริ่มต้นแบบนุ่มนวลและการหยุดแบบนุ่มนวล ไม่สามารถตั้งค่าข้อมูลได้ ยกเว้นในกรณีที่ข้อมูลอยู่ในสถานะอื่นเท่านั้น
ภายใต้สถานะการตั้งค่า สถานะการตั้งค่าจะออกจากสถานะการตั้งค่าโดยไม่มีการดำเนินการใดๆ หลังจาก 2 นาที
กดปุ่ม "Enter" ก่อน จากนั้นชาร์จและสตาร์ทเครื่อง หลังจากฟังเสียงเตือนแล้ว ก็สามารถรีเซ็ตได้
ข้อมูลกลับเป็นค่าโรงงาน
รูปลักษณ์และขนาดการติดตั้ง
แผนภาพการใช้งาน
แผนภาพควบคุมปกติ
คำแนะนำ:
1. เทอร์มินัลภายนอกใช้ตัวควบคุมแบบสองสาย เมื่อ KA1 ปิดเพื่อเริ่มต้น จะเปิดเพื่อหยุด
2. สตาร์ทเตอร์แบบซอฟต์สตาร์ทที่มีกำลังมากกว่า 75 กิโลวัตต์ จำเป็นต้องควบคุมคอยล์คอนแทคเตอร์บายพาสด้วยรีเลย์กลาง เนื่องจากความสามารถในการขับเคลื่อนของหน้าสัมผัสรีเลย์ภายในแบบซอฟต์สเตรเตอร์มีจำกัด
12.2 ไดอะแกรมควบคุมทั่วไปหนึ่งไดอะแกรมและแบบสแตนด์บายหนึ่งไดอะแกรม
12.3 ไดอะแกรมควบคุมทั่วไปหนึ่งไดอะแกรมและแบบสแตนด์บายหนึ่งไดอะแกรม
คำแนะนำ:
1. ในแผนภาพ เทอร์มินัลภายนอกใช้แบบสองสาย
(เมื่อ 1KA1 หรือ 2KA1 ปิด มันก็จะเริ่ม เมื่อพวกมันแตก มันก็จะหยุด)
2. ซอฟต์สตาร์ทเตอร์ที่สูงกว่า 75 กิโลวัตต์จำเป็นต้องควบคุมคอยล์คอนแทคเตอร์บายพาสด้วยรีเลย์กลางเนื่องจากความสามารถในการขับเคลื่อนของหน้าสัมผัสรีเลย์กลางภายในของซอฟต์สตาร์ทเตอร์มีจำกัด